The input metadata offers essential information about the video, comprising a sequence of images that create the motion picture, along with its size, height, and width.
{
"data":{
"sensor-location":"https://assets.samasource.org/...",
"right_camera Camera initial rotation":"[0,0,0]",
"left_camera Camera initial rotation":"[0,0,0]",
"center_camera Camera initial rotation":"[0,0,0]"
}
}
Answers
To understand the 'answer' in this JSON, two concepts are key: 'workspace output' and 'shape output'.
Workspace Output: This is the collective data generated from a digital workspace, encompassing all activities, elements, and their results within that space.
Shape Outputs: These are detailed outputs related to graphical 'shapes' within the workspace, like lines or polygons, each with specific data such as size and color.
In this context, the "answers" element in the JSON acts as a repository that holds both the overall workspace output and the specific data related to individual shapes. This information is organized in a dictionary format using key-value pairs, making it easier to access and manage the diverse range of outputs generated in the workspace.
{
"answers":{
"Scene":[
{
"shapes":[
]
}
]
}
}
Shapes
Cuboid
A 3D cuboid, is a three-dimensional geometric shape characterized by six rectangular faces. Read more
The "index" refers to a unique identifier assigned to each shape, used to distinguish it from others in a sequence. It is a sequential number, meaning each shape is given a consecutive number based on its order in the sequence.
{
"index":1
}
Tag
Tags are descriptive attributes assigned to a shape to provide additional information or classification, depending on how the project is set up tags can be in different formats:
1. Multi-Level Menu: This tag uses a hierarchical format, like "category |sub category" indicating categories and subcategories. 2. Dropdown: A dropdown format, offers a selection from predefined options. 3. Radio Button: This format, allows for choosing one option from a set. 4. Checkbox: A nested structure with binary choices (0 or 1) to indicate features like "left," "none," or "right" roadside.
These varied tag formats provide detailed and specific information about the object, facilitating nuanced classification and understanding.
{
"tags":{
"object_class":"vehicle"
}
}
Key Locations
Shape output
In the 3D world, shapes are made on specific objects within a scene, creating a list of 'shape outputs.' These are known as 'nested outputs' due to their hierarchical organization. They can be part of a larger workspace output or appear as nested objects in a JSON file, providing a structured way to represent 3D annotations
Tags
Tags are descriptive attributes assigned to a shape to provide additional information or classification, depending on how the project is set up tags can be in different formats:
1. Multi-Level Menu: This tag uses a hierarchical format, like "category|sub category," indicating categories and subcategories. 2. Dropdown: A dropdown format, offers a selection from predefined options. 3. Radio Button: This format, allows for choosing one option from a set. 4. Checkbox: A nested structure with binary choices (0 or 1) These varied tag formats provide detailed and specific information about the object, facilitating nuanced classification and understanding.
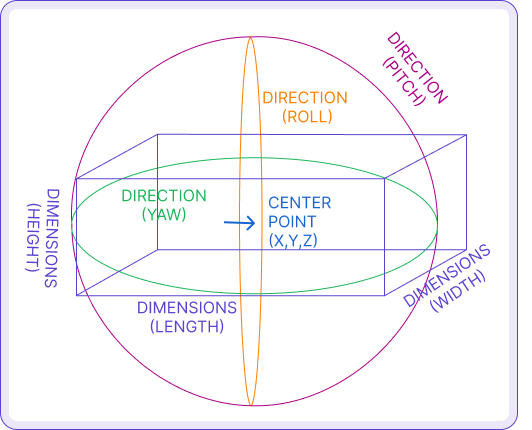
The points represent the vertices (corners) of a 3D cuboid in a three-dimensional coordinate system. Each point is given as a set of three coordinates (x,y,z), indicating the position of a vertex in 3D space A 3D cuboid has eight vertices.
Understanding the Coordinates X-coordinate: Indicates the position along the horizontal axis. Y-coordinate: Represents the position along the vertical axis. Z-coordinate: Shows the depth or height of the point in the third dimension.
The provided points are these vertices. Each vertex is a unique intersection of three edges of the cuboid.
The 'visibility' element indicates the visibility of a shape in a given frame. A shape might be visible in one frame but obscured by another object in the next, rendering it invisible. However, it can reappear in subsequent frames. This element helps track the shape's visibility across different frames.
Visible
{
"visibility": 1,
}
Not visible
{
"visibility": 0,
}
Frame number
The 'frame_number' in a 'key_frame' represents its position within the overall sequence of frames
Locations indicate the frames that are interpolated between two key frames. If a shape isn't visible in a frame, its visibility value is set to 0, and there won't be any associated points array for that frame. That's way some locations are an empty array Inside a location you find all shape outputs: visibility, points, tags, position center, direction, and dimension.